motor_controller.c File Reference
#include "motor_controller.h"
Include dependency graph for motor_controller.c:
Functions | |
| void | MotorControllerBaseOpen (motor_controller_base_t *self, uint8_t speed) |
| void | MotorControllerBaseClose (motor_controller_base_t *self, uint8_t speed) |
| void | MotorControllerBaseStop (motor_controller_base_t *self) |
| void | MotorControllerBaseMoveToPos (motor_controller_base_t *self, uint8_t speed, uint8_t delay, uint8_t power) |
| void | MotorControllerBaseUpdateCurrentValue (motor_controller_base_t *self, uint32_t value) |
| void | MotorControllerBaseTick (motor_controller_base_t *self) |
| void | MotorControllerBaseCalibrate (motor_controller_base_t *self) |
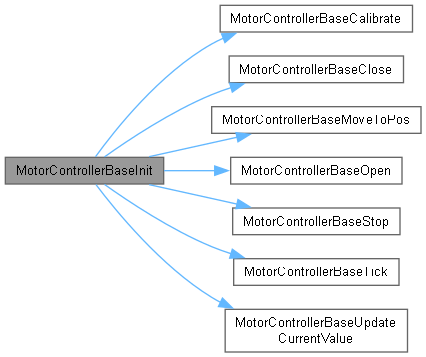
| bool | MotorControllerBaseInit (motor_controller_base_t *self, motor_controller_base_init_t *init, motor_driver_base_t *driver) |
Function Documentation
◆ MotorControllerBaseCalibrate()
| void MotorControllerBaseCalibrate | ( | motor_controller_base_t * | self | ) |
Here is the caller graph for this function:

◆ MotorControllerBaseClose()
| void MotorControllerBaseClose | ( | motor_controller_base_t * | self, |
| uint8_t | speed ) |
Here is the caller graph for this function:

◆ MotorControllerBaseInit()
| bool MotorControllerBaseInit | ( | motor_controller_base_t * | self, |
| motor_controller_base_init_t * | init, | ||
| motor_driver_base_t * | driver ) |
Here is the call graph for this function:
Here is the caller graph for this function:

◆ MotorControllerBaseMoveToPos()
| void MotorControllerBaseMoveToPos | ( | motor_controller_base_t * | self, |
| uint8_t | speed, | ||
| uint8_t | delay, | ||
| uint8_t | power ) |
Here is the caller graph for this function:

◆ MotorControllerBaseOpen()
| void MotorControllerBaseOpen | ( | motor_controller_base_t * | self, |
| uint8_t | speed ) |
Here is the caller graph for this function:

◆ MotorControllerBaseStop()
| void MotorControllerBaseStop | ( | motor_controller_base_t * | self | ) |
Here is the caller graph for this function:

◆ MotorControllerBaseTick()
| void MotorControllerBaseTick | ( | motor_controller_base_t * | self | ) |
Here is the caller graph for this function:

◆ MotorControllerBaseUpdateCurrentValue()
| void MotorControllerBaseUpdateCurrentValue | ( | motor_controller_base_t * | self, |
| uint32_t | value ) |
Here is the caller graph for this function:
