motor_controller_base_t Struct Reference
#include <motor_controller.h>
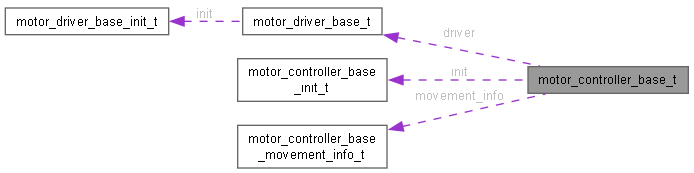
Collaboration diagram for motor_controller_base_t:
Field Documentation
◆ Calibrate
| MotorSelfFuncWithCallback_t Calibrate |
◆ CalibrationFinishCallback
| MotorSelfFunc_t CalibrationFinishCallback |
◆ Close
| MotorSelfFuncWithSpeed_t Close |
Послать в драйвер команду на закрытие
◆ driver
| motor_driver_base_t* driver |
◆ init
◆ movement_info
| motor_controller_base_movement_info_t movement_info |
◆ MoveToPos
| MoveMotorToPosFunc_t MoveToPos |
Послать в драйвер команду на движение в позицию
◆ Open
Послать в драйвер команду на открытие
◆ owner
| void* owner |
◆ Stop
Послать в драйвер команду на остановку
◆ Tick
| MotorSelfFunc_t Tick |
Тик контроллера, регулярно вызываемый
◆ UpdateCurrnetValue
| UpdateMotorParam_t UpdateCurrnetValue |
The documentation for this struct was generated from the following file:
- C:/Users/Andrey/YandexDisk/Motorica/Cube_IDE/main_ubi_sdk/Motors/Controllers/motor_controller.h