#include "../Drivers/motor_driver.h"
#include "stdbool.h"
Go to the source code of this file.
|
| enum | motor_state_enum { MSE_IDLE = 0
, MSE_BREAK
, MSE_MOVE
} |
| |
| enum | MOT_DIR { MOT_STOP = 0
, MOT_OPEN
, MOT_CLOSE
} |
| |
| enum | drive_move_mode_enum { FMME_CURRENT_CONTROL = 1<<0
, FMME_ENCODER_CONTROL = 1<<1
, FMME_TIME_CONTROL = 1<<2
} |
| |
| enum | mot_stop_reason_enum {
MOT_ENCODER_TARGET_POS_FINISH = 0
, MOT_SMALL_CURENT_STOP
, MOT_OVERCURENT_STOP
, MOT_MANUAL_STOP
,
MOT_TIMEOUT_STOP
} |
| |
◆ MotorSelfFunc_t
| typedef void(* MotorSelfFunc_t) (void *self) |
◆ MotorSelfFuncWithCallback_t
| typedef void(* MotorSelfFuncWithCallback_t) (void *self, MotorSelfFunc_t Callback) |
◆ MotorSelfFuncWithReason_t
| typedef void(* MotorSelfFuncWithReason_t) (void *self, uint8_t reason) |
◆ MotorSelfFuncWithSpeed_t
| typedef void(* MotorSelfFuncWithSpeed_t) (void *self, uint8_t speed) |
◆ MoveMotorToPosFunc_t
| typedef void(* MoveMotorToPosFunc_t) (void *self, uint8_t speed, uint8_t delay, uint8_t power, uint8_t force) |
◆ UpdateMotorParam_t
| typedef void(* UpdateMotorParam_t) (void *self, uint32_t value) |
◆ drive_move_mode_enum
| Enumerator |
|---|
| FMME_CURRENT_CONTROL | |
| FMME_ENCODER_CONTROL | |
| FMME_TIME_CONTROL | |
◆ MOT_DIR
| Enumerator |
|---|
| MOT_STOP | |
| MOT_OPEN | |
| MOT_CLOSE | |
◆ mot_stop_reason_enum
| Enumerator |
|---|
| MOT_ENCODER_TARGET_POS_FINISH | |
| MOT_SMALL_CURENT_STOP | |
| MOT_OVERCURENT_STOP | |
| MOT_MANUAL_STOP | |
| MOT_TIMEOUT_STOP | |
◆ motor_state_enum
| Enumerator |
|---|
| MSE_IDLE | |
| MSE_BREAK | |
| MSE_MOVE | |
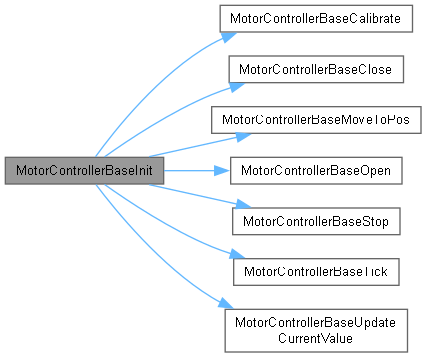
◆ MotorControllerBaseInit()