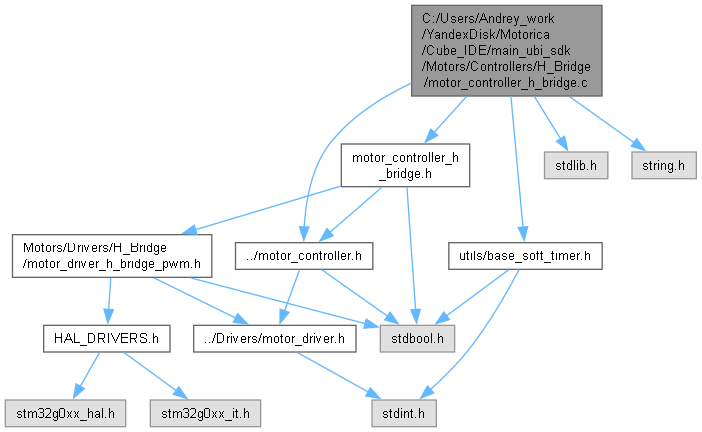
#include "motor_controller_h_bridge.h"#include "../motor_controller.h"#include "stdlib.h"#include "string.h"#include "utils/base_soft_timer.h"
Include dependency graph for motor_controller_h_bridge.c:
Variables | |
| soft_timer_class_struct * | ms_timer_obj |
Function Documentation
◆ brake_timeout_finish_event()
| void brake_timeout_finish_event | ( | soft_timer_class_struct * | soft_timer_obj, |
| int | instance, | ||
| motor_controller_h_bridge_t * | self ) |
Here is the caller graph for this function:

◆ calculate_encoder_pos()
|
static |
Here is the caller graph for this function:

◆ MotorControllerHBrdidgeClose()
| void MotorControllerHBrdidgeClose | ( | motor_controller_h_bridge_t * | self, |
| uint32_t | speed ) |
Here is the call graph for this function:

Here is the caller graph for this function:

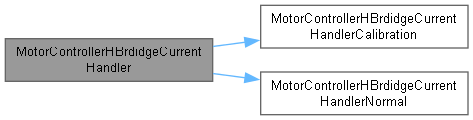
◆ MotorControllerHBrdidgeCurrentHandler()
| void MotorControllerHBrdidgeCurrentHandler | ( | motor_controller_h_bridge_t * | self | ) |
Here is the call graph for this function:
Here is the caller graph for this function:

◆ MotorControllerHBrdidgeCurrentHandlerCalibration()
| void MotorControllerHBrdidgeCurrentHandlerCalibration | ( | motor_controller_h_bridge_t * | self | ) |
Here is the caller graph for this function:

◆ MotorControllerHBrdidgeCurrentHandlerNormal()
| void MotorControllerHBrdidgeCurrentHandlerNormal | ( | motor_controller_h_bridge_t * | self | ) |
Here is the caller graph for this function:

◆ MotorControllerHBrdidgeEncoderHandler()
| void MotorControllerHBrdidgeEncoderHandler | ( | motor_controller_h_bridge_t * | self | ) |
Here is the caller graph for this function:

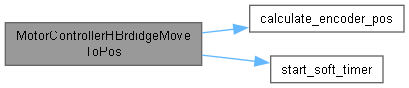
◆ MotorControllerHBrdidgeMoveToPos()
| void MotorControllerHBrdidgeMoveToPos | ( | motor_controller_h_bridge_t * | self, |
| uint8_t | pos, | ||
| uint8_t | start_delay, | ||
| uint8_t | power, | ||
| uint8_t | speed ) |
Here is the call graph for this function:
Here is the caller graph for this function:

◆ MotorControllerHBrdidgeOpen()
| void MotorControllerHBrdidgeOpen | ( | motor_controller_h_bridge_t * | self, |
| uint32_t | speed ) |
Here is the call graph for this function:

Here is the caller graph for this function:

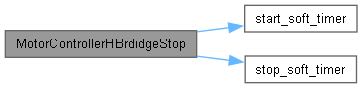
◆ MotorControllerHBrdidgeStop()
| void MotorControllerHBrdidgeStop | ( | motor_controller_h_bridge_t * | self, |
| mot_stop_reason_enum | reason ) |
Here is the call graph for this function:
Here is the caller graph for this function:

◆ MotorControllerHBrdidgeUpdateCurrentValue()
| void MotorControllerHBrdidgeUpdateCurrentValue | ( | motor_controller_h_bridge_t * | self, |
| int32_t | newuA ) |
Here is the caller graph for this function:

◆ MotorControllerHBridgeCalibrationFinishCallback()
| void MotorControllerHBridgeCalibrationFinishCallback | ( | motor_controller_h_bridge_t * | self | ) |
Here is the caller graph for this function:

◆ MotorControllerHBridgeCalibrationStart()
| void MotorControllerHBridgeCalibrationStart | ( | motor_controller_h_bridge_t * | self, |
| MotorSelfFunc_t | FinishCallback ) |
Here is the call graph for this function:

Here is the caller graph for this function:

◆ MotorControllerHBridgeCalibrationStopEvent()
| void MotorControllerHBridgeCalibrationStopEvent | ( | motor_controller_h_bridge_t * | self, |
| mot_stop_reason_enum | reason ) |
Here is the caller graph for this function:

◆ MotorControllerHBridgeInit()
| bool MotorControllerHBridgeInit | ( | motor_controller_h_bridge_t * | self, |
| motor_controller_base_init_t * | init, | ||
| motor_driver_h_bridge_pwm_t * | driver ) |
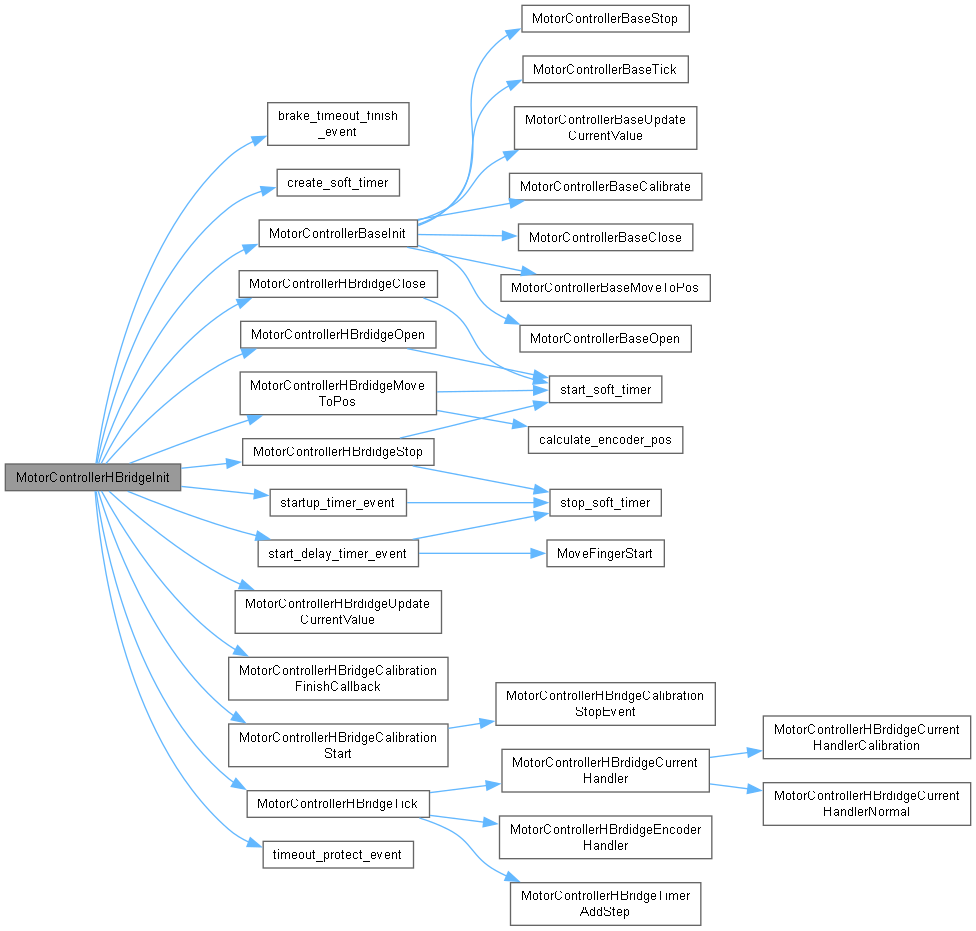
Here is the call graph for this function:
◆ MotorControllerHBridgeTick()
| void MotorControllerHBridgeTick | ( | motor_controller_h_bridge_t * | self | ) |
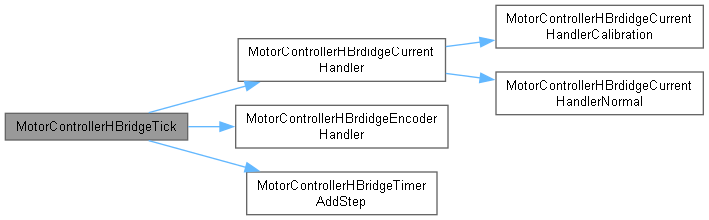
Here is the call graph for this function:
Here is the caller graph for this function:

◆ MotorControllerHBridgeTimerAddStep()
| void MotorControllerHBridgeTimerAddStep | ( | motor_controller_h_bridge_t * | self | ) |
Here is the caller graph for this function:

◆ MoveFingerStart()
| void MoveFingerStart | ( | motor_controller_h_bridge_t * | self | ) |
Here is the caller graph for this function:

◆ start_delay_timer_event()
| void start_delay_timer_event | ( | soft_timer_class_struct * | soft_timer_obj, |
| int | instance, | ||
| motor_controller_h_bridge_t * | self ) |
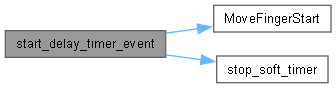
Here is the call graph for this function:
Here is the caller graph for this function:

◆ startup_timer_event()
| void startup_timer_event | ( | soft_timer_class_struct * | soft_timer_obj, |
| int | instance, | ||
| motor_controller_h_bridge_t * | self ) |
Here is the call graph for this function:

Here is the caller graph for this function:

◆ timeout_protect_event()
| void timeout_protect_event | ( | soft_timer_class_struct * | soft_timer_obj, |
| int | instance, | ||
| motor_controller_h_bridge_t * | self ) |
Here is the caller graph for this function:

Variable Documentation
◆ ms_timer_obj
|
extern |