motor_controller_h_bridge.h File Reference
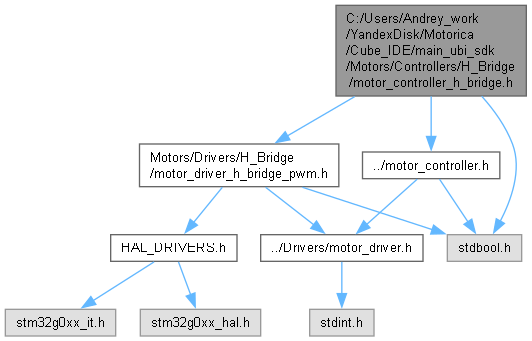
#include "../motor_controller.h"#include "Motors/Drivers/H_Bridge/motor_driver_h_bridge_pwm.h"#include "stdbool.h"
Include dependency graph for motor_controller_h_bridge.h:
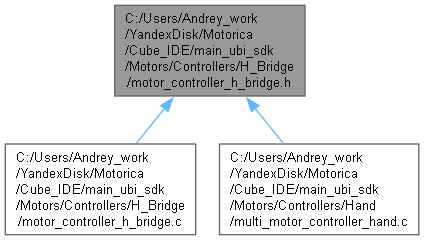
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Data Structures | |
| struct | motor_controller_h_bridge_settings_t |
| struct | motor_controller_h_bridge_calibrating_struct_t |
| struct | motor_controller_h_bridge_t |
Macros | |
| #define | STARTUP_BURST_LENGHT_MS 2 |
| #define | MAX_MOT_ACTIVE_TIME 3000 |
| #define | ENCODER_POS_MAX 100 |
| #define | ENCODER_ACCURACY_MULTIPLIER 100 |
| #define | ENCODER_PROTECT_DELTA 2 |
| #define | ADC_TO_CURRENT_UA_COEF 336 |
Enumerations | |
| enum | mot_start_reason_enum { MOT_MANUAL_START = 0 , MOT_SERVICE_START } |
| enum | drive_calibrating_state_enum { FCS_FIRST_OPEN = 0 , FCS_CALIBRATING_CLOSE , FCS_CALIBRATING_OPEN } |
| enum | drive_mode_enum { FME_NORMAL = 0 , FME_CALIBRATING , FME_ERROR , FME_OPTIC_CONTORL } |
Functions | |
| bool | MotorControllerHBridgeInit (motor_controller_h_bridge_t *self, motor_controller_base_init_t *init, motor_driver_h_bridge_pwm_t *driver) |
Macro Definition Documentation
◆ ADC_TO_CURRENT_UA_COEF
| #define ADC_TO_CURRENT_UA_COEF 336 |
◆ ENCODER_ACCURACY_MULTIPLIER
| #define ENCODER_ACCURACY_MULTIPLIER 100 |
◆ ENCODER_POS_MAX
| #define ENCODER_POS_MAX 100 |
◆ ENCODER_PROTECT_DELTA
| #define ENCODER_PROTECT_DELTA 2 |
◆ MAX_MOT_ACTIVE_TIME
| #define MAX_MOT_ACTIVE_TIME 3000 |
◆ STARTUP_BURST_LENGHT_MS
| #define STARTUP_BURST_LENGHT_MS 2 |
Enumeration Type Documentation
◆ drive_calibrating_state_enum
◆ drive_mode_enum
| enum drive_mode_enum |
◆ mot_start_reason_enum
Function Documentation
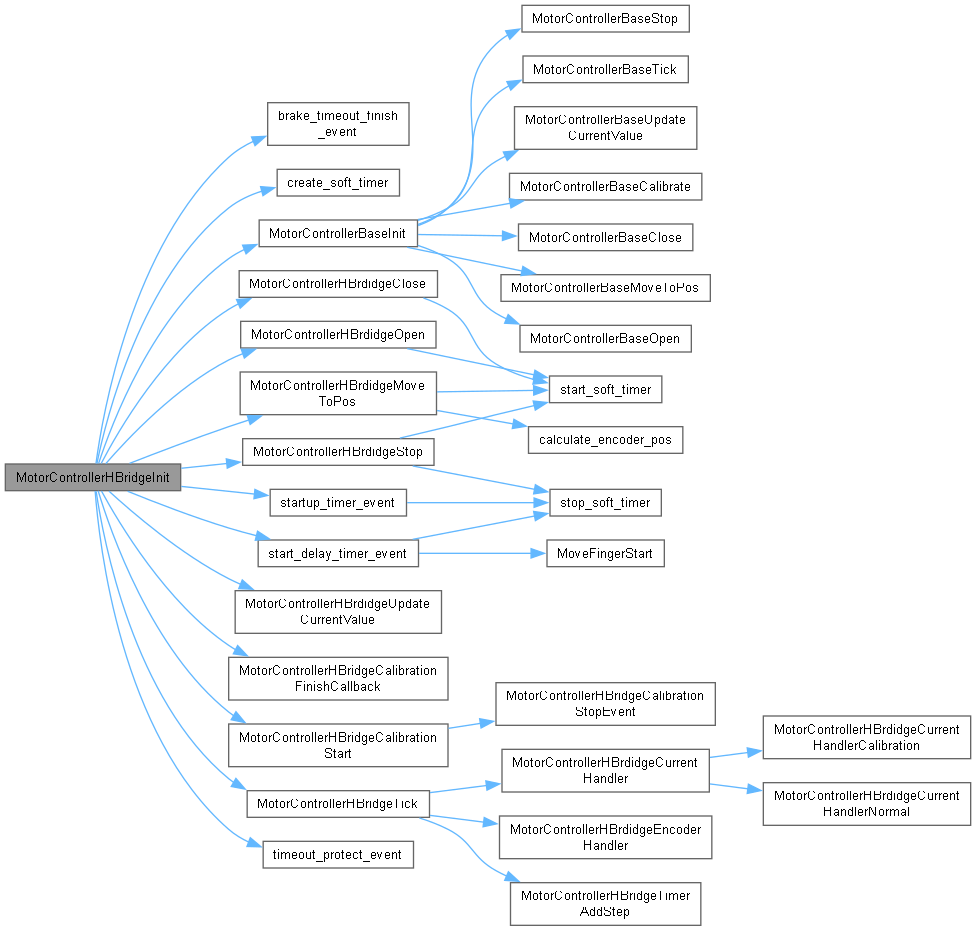
◆ MotorControllerHBridgeInit()
| bool MotorControllerHBridgeInit | ( | motor_controller_h_bridge_t * | self, |
| motor_controller_base_init_t * | init, | ||
| motor_driver_h_bridge_pwm_t * | driver ) |
Here is the call graph for this function: